Path Planning for Quadrotor using Artificial Potential Field Approach to follow Dynamic Target and avoid Static Obstacles
Abstract
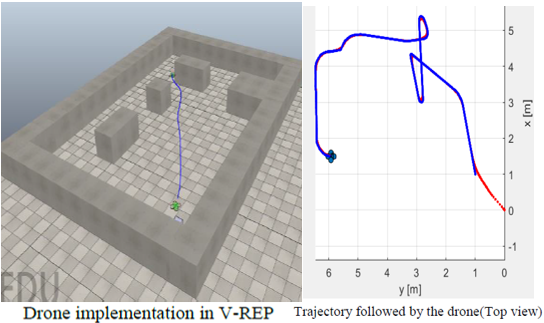
The potential field algorithm which was introduced by Khatib in the 1980s is well-known in path planning for robots. The algorithm is very simple yet provides real-time path planning and is effective to avoid robot’s collision with obstacles and hence it is a reactive path planning algorithm. It can provide the path in a changing environment. The purpose of the paper is to implement an artificial potential path planner in V-REP.VREP is a 3D robot simulation software with an integrated development environment that allows us to model, edit, program, and simulate any robot or robotic system. We have used MATLAB to do the computational aspects for path planning and VREP is used as a visualization platform. In addition to this, we have applied this algorithm to a six DOF drone whose modeling is done in MATLAB. The simulation result we got indicates the fact that the artificial potential field algorithm is a good choice if we used it as a local planner than a global planner. In many cases, the robot got trapped in local minima, which prevents the robot from reaching the target position. Hence It can be concluded that the artificial potential field algorithm needs to be modified to pass all of the local minima problems.
Lokesh Bansal
MTech Student
My research interests include Mind-Controlled Robotics, Wearable Soft and Evolutionary Robotics, Bio-inspired Legged and Aerial Robotics.