Lokesh Bansal
MTech Student
Robert Bosch Center for Cyber Physical Systems
Indian Institute of Science, Bangalore, India
Biography
Currently, I am pursuing M.Tech. in Robotics and Autonomous Systems at the Indian Institue of Science, Bangalore, India. I am a graduate of Aerospace Engineering from Punjab Engineering College, Chandigarh, India. I am an awardee of the prestigious scholarship MITACS Research Internship Program 2019.
I am interested in multiagent learning and safe exploration. I am motivated to further deploying such safe policies in real world systems, which still is limited majorly limited to ideal settings. I am also interested in theoretical optimization work. Definitely, it is quite interesting to view Reinforcement Learning in the framework of non-convex non-concave optimization and hence forth deriving efficient algorithms for RL with stronger convergence guarantees and bounds.
Previously, I was an Assistant Professor at Punjab State Aeronautical Engineering College, Patiala, Punjab, India. Prior to this, I have worked on Computer Vision and Deep Reinforcement Learning Based Automation project under Prof. Rene Jr Landry at the École de Technologie Supérieure, Montreal, Canada.
- Mind-Controlled Robotics
- Wearable Soft and Evolutionary Robotics
- Bio-inspired robots
- Aerial Robotics
- Path Planning, Navigation and Control
-
MTech in Robotics and Autonomous Systems, 2021-2023
Indian Institute of Science, Bangalore, India
-
BTech in Aerospace Engineering, 2016-2020
Punjab Engineering College, Chandigarh, India
-
Intermediate/+2, 2015
OSDAV Public School, Kaithal, India
Experience
Was the main instructor for the following courses
- Helicopter Dynamics: Helicopter Configuration, Control Requirements, Momentum Theory, Blade Element Theory, Ideal Rotor Vs Optimum Rotor, Autorotation in Vertical Descent, Vertical Flight, Forward Flight, Introduction to Navigation Guidance and Control for Intelligent Fight.Video Lectures
- Aircraft Structures: Strength of Material, Truss, Thin-Walled Structures.Video Lectures
- Aircraft Performance: Basics of Aerodynamics, Cruise, Climb & glide flight performance, Range & Endurance, Landing & Take-off Performance.Video Lectures
- Aircraft Stability and Control: Longitudinal and Lateral Stability and Control, Dynamic Stability: Euler angles, Equations of motion, Longitudinal and Lateral-directional modes.Video Lectures
- Advisor: Prof. Rene Jr Landry, Department of Electrical Engineering, Ecole de Technologie Superieure
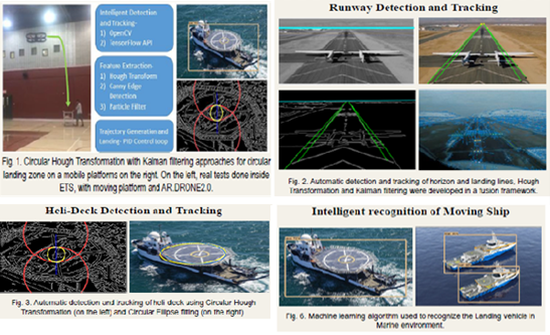
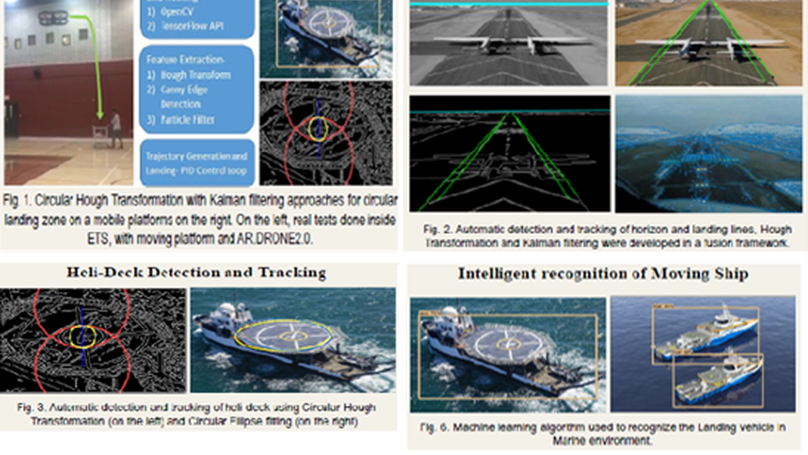
- Worked on autonomous landing for drones on a moving platform in GPS-denied environment.
- Performed hardware integration of Quadrotor, design, and implementation of Ground Mission System.
- Developed algorithms using classical and state-of-the-art Deep Learning and Reinforcement Learning techniques for image processing and navigation such as Hough Transform, OpenCV, TensorFlow for intelligent object detection for drone landing
- Github Repository
- Advisor: Prof. Pushpak Jagtap
- Title: Safe Learning for MADDPG with Control Barrier Certification for Long duration ground surveillance
- Objective: Surveillance with the help of ground robots such that agents get distributed in equal Voronoi tessellation
- Safety Constraints: Obstacle avoidance, prevent Robots from draining out and overcharging
- Safety constraints are taken care by Control Barrier Certification and Objective is fulfilled with Multi Agent Deep Deterministic Policy Gradient algorithm
- Advisor: Prof. Debashish Ghose
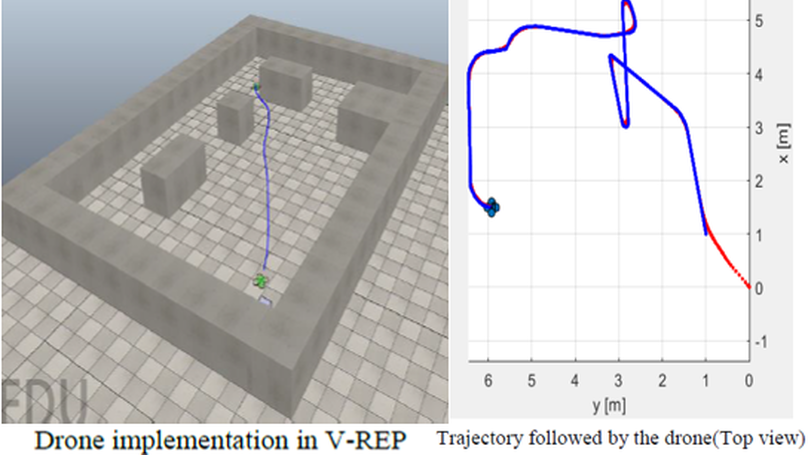
- Title: Efficient Path Planning for Quadrotor/Mobile Robots using RRT with Safety Certificates
- Execution time of RRT node sampling is reduced by efficient collision checking with safety certificates
- Modified RRT used to generate obstacle free path to reach a static goal by avoiding static obstacles
- Formation Control for Multiple robots deployed to carry a fragile object from start to goal
- Safe path planning for the robots along with the object carried by the robots
- Modified RRT is used to give safe path from start to goal in static environment
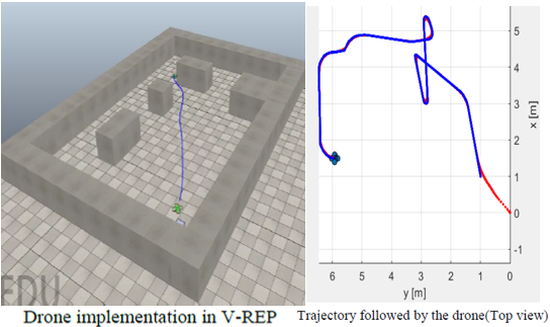
- Simulation in MATLAB and CoppeliaSim (V-REP)
- Advisor: Prof. Shishir Kolathyan
- Quadrotor Path Planning using Artificial Potential Field Approach
- Generated trajectory using Artificial Potential Field approach to follow a dynamic target and to avoid for static obstacles.
- Modelled 6-DOF model for Quadrotor with PD controller for trajectory tracking.
- Analyzed large set of Operations data for Airlines Industry, creating charts and visualizations.
- Generated insights based on different sets of data such as Delayed flight, Cabin functioning, etc.
- Gained experience in handling large volumes of data with expertise in Data extraction, Data Visualization, Exploratory Data Analysis, and skilled in various data analysis tools like Advanced Excel, SQL, programming in C, Python, etc.
- Advisor: Satish Vasu Kailas, Tribology Lab, Indian Institute of Science, Bangalore, India
- Tribological behavior of Al6063 –Mild Steel tribo pair.
- Investigated the effects of various rubbing conditions that results in various wear and lubrication aspects of Aluminium and Mild Steel tribo-pair.
- Worked with Computer-Aided Designing tools such as AutoCAD, Ansys etc. and learned to perform experiments on Tribometer, Raman Spectroscopy, Scanning Electron Microscope, etc.
Awards and Recognition
Projects
Research Work
Contact
- lokeshbansal@iisc.ac.in
- +91-9079425698
- Robert Bosch Center for Cyber Physical Systems, Indian Institute of Science - Bangalore, Bangalore, KA 560012
- Come to SID Building inside IISc, take the stairs to 3rd floor to RBCCPS center.
-
Monday-Friday 10:00 to 18:00
Saturday-Sunday 12:00 to 17:00