Lokesh Bansal
Lokesh Bansal
Home
Experience
Projects
Awards and Recognition
Research Work
Contact
CV
Light
Dark
Automatic
Path Planning
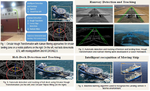
Intelligent Algorithms for UAV Automatic Landing on-board a Moving Platform
To develop a fully autonomous UAV it is important that it can detect the environmental conditions, so that autonomous Navigation and …
Lokesh Bansal
,
Hamza Benzerouk
,
Rene Jr. Landry
PDF
Code
Slides
Video
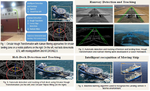
Intelligent Algorithms for UAV Automatic Landing on-board a Moving Platform
To develop a fully autonomous UAV it is important that it can detect the environmental conditions, so that autonomous Navigation and …
Lokesh Bansal
,
Hamza Benzerouk
,
Rene Jr. Landry
PDF
Code
Slides
Video
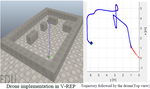
Path Planning for Quadrotor using Artificial Potential Field Approach to follow Dynamic Target and avoid Static Obstacles
The potential field algorithm which was introduced by Khatib in the 1980s is well-known in path planning for robots. The algorithm is …
Lokesh Bansal
,
Sangeet M
,
Vaishnav K V
PDF
Code
Slides
Video
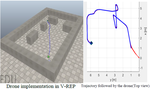
Path Planning for Quadrotor using Artificial Potential Field Approach to follow Dynamic Target and avoid Static Obstacles
The potential field algorithm which was introduced by Khatib in the 1980s is well-known in path planning for robots. The algorithm is …
Lokesh Bansal
,
Sangeet M
,
Vaishnav K V
PDF
Code
Slides
Video
Cite
×